Il existe autant de marches que d’individus. Ceci signifie que lorsque l’on va décrire la marche il va falloir tenir compte des propres caractéristiques de l’individu.
Le but de la marche est que l’individu utilise cette dernière afin de devenir autonome. L’individu est sur le principe d’économie d’énergie maximum. C’est à dire qu’à chaque fois que l’on va demander à un sujet de réaliser un mouvement, il va toujours choisir d’effectuer la solution la moins coûteuse en énergie.
Ainsi, lorsque l’on fait une rééducation, il faut tenir compte de ce principe, car si on demande au sujet de modifier sa façon de marcher et que cette nouvelle façon est plus coûteuse que celle qu’il avait auparavant, on va directement à l’éche
1ère PARTIE – DEFINITION DE LA MARCHE.
Ce qui différencie la marche de la course c’est que dans la marche il y a toujours un contact au sol.
La marche se caractérise comme un mode de déplacement bipédique avec une activité alternée des membres inférieurs et un maintient de l’équilibre dynamique. La marche est un déséquilibre permanent vers l’avant car si le sujet est ramené à une masse (à un CG) la marche consiste à projeter le CG toujours en avant du PS. Dans ce cas là, le membre inférieur antérieur a pour fonction de rattraper ce déséquilibre.
La marche se caractérise par des phénomènes de propulsions et d’amortissement ou de freinage.
La marche est une succession de pas. Le pas se défini comme la caractéristique d’un moment spécifiques à un côté, jusqu’à la reproduction de ce même moment. Classiquement on détermine le contact talon en avant comme le début de l’analyse d’un pas.
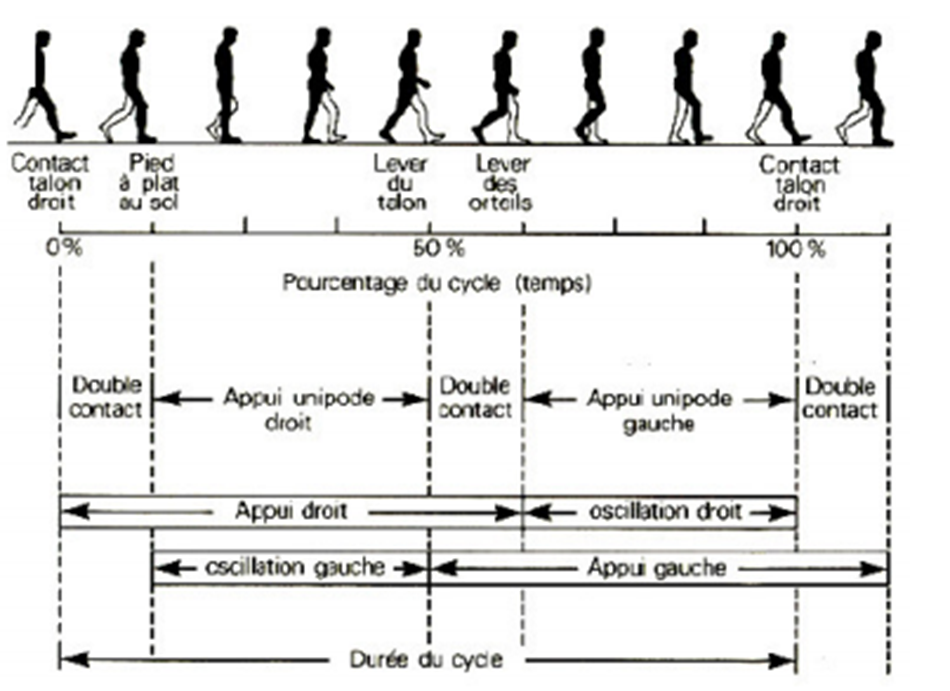

Le cycle de marche se défini comme l’intervalle de ces deux événements précédents successifs que l’on caractérise aussi par le pas. Donc un pas = 1 demi pas + 1 demi pas. Ceci est un cycle de marche.
Le cycle de marche se différencie en deux phases principales:
– Une phase d’appui.
– Une phase oscillante.


On distingue au niveau du pas certains paramètres:
Les paramètres du pas.
La vitesse moyenne.
C’est le nombre de mètres par secondes parcouru par l’individu.
La cadence.
En ayant la vitesse moyenne on peut calculer le nombre de pas réalisés en une minute, ce qui nous donne la cadence.
Les paramètres temporels.
Ces derniers concernent toutes les évaluations des différentes phases (durée d’appui, double appui, oscillation…). On parle ici d’évaluation du périmètre de marche mais en temps. Par exemple le sujet dit qu’il est capable de marcher durant 10 min mais on ne saura pas le nombre de mètre parcouru. Cela correspond aux paramètres spatiaux.
Les paramètres spatiaux.
On va ici évaluer la distance de l’enjambée, la largeur du pas, l’angulation du pas (on doit toujours avoir environ 15° d’angulation pour chacun des pieds).
On différencie au niveau du cycle de marche:
- Une phase d’appui.
- Une phase oscillante.
On peut différencier aussi deux périodes de double appui et deux périodes d’appui unilatéral. Ainsi, si on amène le cycle de pas à 100%, on a:
- La phase d’appui = 60 à 65% du cycle. Dont deux phases de double appui:
- 10 à 15% pour la première.
- 60 à 65% pour la deuxième.
- La phase d’oscillation = 35 à 45% du cycle.
Ces différents paramètres varient avec l’âge et avec la vitesse (où la phase de l’oscillation devient proportionnellement plus longue que les phases d’appui et de double appui).
Si il y a disparition totale des doubles appuis, on va se trouver au niveau de la transition entre marche et course.
On note qu’il y a une différence individuelle entre le côté droit et le côté gauche. Cette asymétrie latérale nous pousse à estimer une dominante propulsive et une dominante amortisseur (pied à dominante propulsive et un pied à dominante amortisseur).
2ème PARTIE – DESCRIPTION MORPHOLOGIQUE DE LA MARCHE.
- Les membres supérieurs.
Ils se balancent de façon synchrone et alternée avec les membres inférieurs. Ce minimum de mouvement va permettre une giration scapulaire de 7 à 10°.
- Les mouvements du tronc.
- Les mouvements de torsion.
Lors de la marche, les deux ceintures vont présenter des mouvements de rotation opposés et l’axe des épaules va varier en sens inverse avec l’axe du bassin.
L’hémi-bassin va resté solidaire du membre correspondant. C’est à dire que quand on est en extension au niveau de la jambe droite mon hémi-bassin droit est en arrière par rapport au gauche et mon épaule droite est en avant de l’épaule gauche.
Lors du passage à la verticale de mon membre inférieur portant les deux axes (épaules et bassin) sont parrallèles et de même direction.
- Les rotations vertébrales.
On niveau du dos il existe un point de transition, c’est à dire une vertèbre qui ne tourne pas. Ce point se situe entre T7 et T8 (entre les deux épines de l’omoplate).
Au dessus de ce point on estime environ 5° de rotation pour la première vertèbre thoracique.
En dessous on estime environ 8° de rotation en sens inverse pour la 5ème vertèbre lombaire.
Les mouvements du bassin tourne autour de la tête fémorale porteuse pour surmonter le pied en contact avec le sol. C’est ce que l’on appelle le pas pelvien.
- Les mouvements d’inclinaisons au niveau du tronc.
Ici aussi les mouvements des ceintures s’inversent lors de leur inclinaison. Le bassin s’abaisse du côté non portant alors que l’épaule s’élève de ce même côté. Donc ce phénomène va se reproduire deux fois pour l’élévation et deux fois pour l’abaissement au cours du cycle avec une amplitude d’environ 30 à 50 mm.
Le point le plus haut correspond aux phases d’appui et d’oscillation.
Le point le plus bas correspond au point du double appui.
Lors d’une vitesse normale on décrit une inclinaison d’environ 5° vers l’avant.
- Les mouvements d’oscillation dans le plan frontal.
Lors de la marche l’ensemble du tronc se déporte vers le côté portant. On estime environ se déplacement latéral de 50 mm.
- Les mouvements des membres inférieurs.
- Lors de la phase d’appui.
On décrit le côté droit, qui comme pour le gauche comprend une phase d’appui et une d’oscillation.
On divise la phase d’appui en trois phases:
- Deux phases de double appui.
- Une phase d’appui monopodal.
- Le premier temps de double appui.
Correspond au 0 à 15% du début du cycle de marche. On distingue trois étapes:
Premier temps: L’attaque du talon.
Cela consiste à faire passer le talon (droit) en avant et on effectue le mouvement d’avant en arrière pour rentrer en contact avec le sol. Ce contact va aussi jouer le rôle d’amortisseur de d’absorption de chocs.
Le membre inférieur droit effectue donc un appui antérieur de réception pied en position neutre, c’est à dire cheville à 90°.
Par contre, le pied fait un angle de 30° par rapport au sol. Cependant, cette angulation va varier selon l’état du terrain rencontré. Par exemple sur de la glace, ayant très peu de force de frottement intervenant entre le talon et le sol, si le sujet ne veut pas glisser, il faut qu’il fasse de petit pas afin de diminuer cet angle pied/sol.
Le genou droit est en quasi extension et la hanche droite en flexion de 30° par rapport à la verticale.
Le bassin est légèrement oblique de bas en haut et de droite à gauche.
Le pied gauche a décollé le talon, ne reposant au niveau du sol uniquement sur l’avant pied. Il est en légère flexion dorsale.
Le genou gauche est légèrement fléchi et la hanche gauche en extension de 10 à 15°. Ce membre inférieur gauche effectue un appui postérieur de propulsion.
Deuxième temps: Le rabattement du pied droit au sol.
On va distinguer deux temps:
- Une phase rapide, qui correspond à la chute du pied.
- Une phase lente, qui correspond à une activité musculaire.
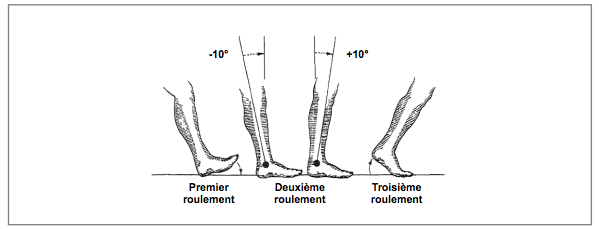
La première phase va légèrement précéder la verticalisation de la jambe droite puisque dans cette phase le segment jambier a encore une inclinaison de 10° par rapport à la verticale. C’est à dire qu’après le contact talon, le pied chute mais il y a encore une inclinaison arrière du segment jambier de 10° par rapport à la verticale.
On passe environ de 90° voire 100° de flexion plantaire droite.
Le genou droit lui continue à se fléchir légèrement.
On commence à avoir une légère avancée du bassin ce qui permet une diminution de la flexion de hanche droite.
Le pied gauche passe d’une position en flexion dorsale à une position à angle droit. On passe donc de 70° à 90° environ.
Le genou gauche reste toujours fléchie et la hanche gauche en extension.
Troisième étape: La verticalisation de la jambe portante.
Quand la jambe droite se met à la verticale, le pied droit retrouve environ ses 90°.
Le genou et la hanche droits diminuent leur flexion, sachant que le genou n’atteint jamais l’extension totale. La hanche elle va peu à peu se retrouver en rectitude.
Du côté gauche, le pied ne repose que sur la tête des métatarsiens et des orteils. On se retrouve avec une flexion plantaire de 15 à 20°.
Le genou lui continue à se fléchir et l’extension de la hanche gauche va progressivement diminuer mais la cuisse n’est pas encore à la verticale.
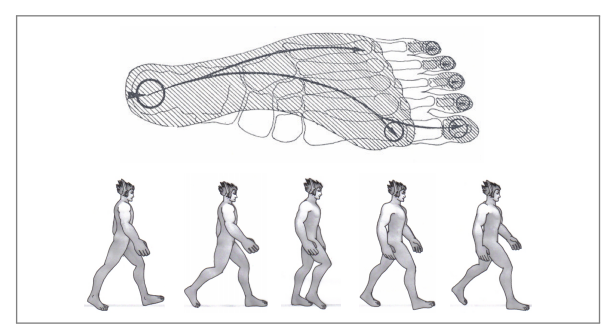
Le pied gauche quittera le sol grâce à la poussée du gros orteil.
Il existe trois phénomènes expliquants le rôle amortisseur du pied:
- L’absorption du choc par les parties molles du talon.
- Le rabattement du pied au sol freiné par les muscles de la loge antéro-externe.
- La première flexion du genou lors de cette phase.
- Le premier pas unilatéral.
On divise cette phase en trois étapes.
Cette phase dure 35% du cycle de marche. Durant cette dernière, le membre inférieur droit effectue trois fonctions:
- Soutient du poids du corps.
- Equilibration dans les trois plans de l’espace.
- Fonction de progression. Le membre inférieur qui était oblique en bas et en avant, va se verticaliser pour devenir oblique en bas et en arrière.

L’avant passage à la verticale.
Le pied droit sera toujours à 90° et le genou droit sera encore légèrement fléchi.
La hanche droite diminue encore sa flexion sans pour autant atteindre la rectitude maximale.
Le côté gauche vient de quitter l’appui au sol. Pour passer le pas, il doit effectuer une triple flexion:
- Pied légèrement en flexion dorsale, voire rectitude.
- Le genou gauche atteint 65 à 70° de flexion qui sera sa flexion maximale.
- La hanche gauche commence à diminuer son extension.
Le passage à la verticale.
C’est le moment où le CG va croiser l’articulation tibio-tarsienne du membre portant. Le pied droit est à plat sur le sol, genou et hanche droits sont légèrement fléchis.
A ce moment là, le membre inférieur gauche croise le droit devenant antérieur (flexion de hanche) tout en réduisant légèrement sa flexion de genou.
L’après passage à la verticale.
Le pied droit reste à plat sur le sol et la jambe s’incline progressivement vers l’arrière pour aboutir à une flexion dorsale de 15°.
Le genou droit maintient sa rectitude qui va persister jusqu’au décollement du talon droit et la hanche droite commence à se mettre en extension, l’hémibassin gauche devenant antérieur au droit.
Durant la fin de cette étape:
On assiste au décollement du talon droit, jambe droite devenant légèrement oblique en haut et en avant. Le genou droit se fléchi progressivement afin de permettre l’avancé du tronc sans entraîner une flexion de hanche droite.

Le pied gauche reste à angle droit sur la jambe et va aller prendre contact avec le sol par le talon, pied en légère supination.
- Le deuxième temps de double appui.
Il est analogue au premier temps. C’est le membre inférieur gauche qui exécute un appui de réception, le membre inférieur droit lui exécutant un appui de propulsion. Nous sommes ici de 60 à 65% du pas.
- La phase oscillante.
Cette phase correspond à la phase de deuxième appui unilatéral de la phase d’appui.
Dans cette phase, le membre inférieur droit passe d’une position postérieure à une position antérieure. C’est le membre inférieur gauche qui est maintenant le membre portant. Ce membre reprend les différentes étapes vues lors de l’appui unilatéral du membre inférieur droit.
Il faut savoir que les phases de verticalisation des membres (portant et oscillant) interviennent à peu prés au milieu de leur phase respective. Donc:
- Pour le passage à la verticale du segment portant ceci correspond à 30, 35% du cycle.
- Pour le passage à la verticale du membre oscillant cela correspond à 70, 75% du cycle de marche.
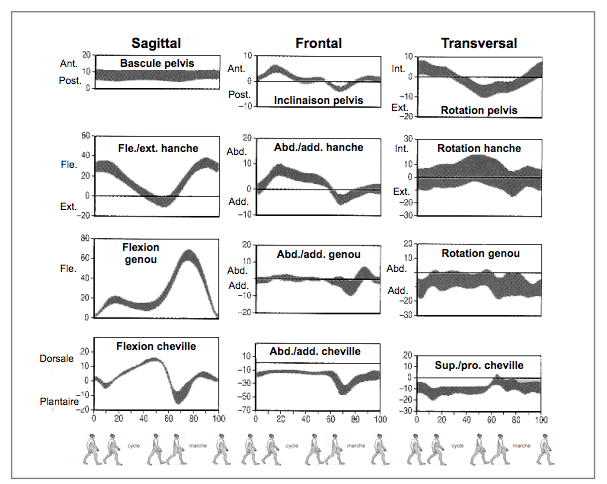

3ème PARTIE – LA CINEMATIQUE DE LA MARCHE.
La cinématique va nous permettre d’étudier de manière stricte et rigoureuse les variations dans les trois plans de l’espace. On va surtout voir les phénomènes de flexion extension des trois principales articulations qui sont :
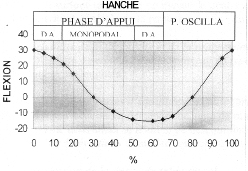

En début de phase la hanche arrive en flexion de 30 à 35°. Puis la hanche se tend progressivement pour arriver à une extension de 10 à 15° lors de la phase portante. Au passage à la verticale, entre temps, la hanche est en position neutre.
Dès que commence la phase de double appui, la hanche reprend sa position progressive de flexion en passant de nouveau à 0° lors de la deuxième phase verticale du membre, devenu oscillant.
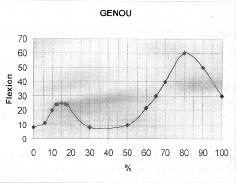

- Lors du contact talon le genou est quasiment en extension et durant les 30 premiers degré du cycle de marche, on observe le premier pic de flexion d’amplitude de 15 à 20°, qui permet de s’associer au rôle amortisseur du talon et de limitation de vitesse.
- Vers 30% du cycle, le genou se retrouve en quasi extension.
- On retrouve le début du deuxième pic de flexion dès le début de la deuxième phase de double appui avec le début du soulever du talon. Cette flexion atteindra son maximum d’environ 60 à 70° au début de la phase oscillante (70° du cycle).
- Le genou retrouve ensuite très rapidement sa position d’extension quasi complète vers 100% du cycle, c’est à dire au prochain double appui.
- On remarque que le genou n’atteint jamais une extension complète au cours du cycle de marche, ce qui permet des fluctuations les plus appropriées de la vitesse et ce qui évite aussi le verrouillage en rotation lors de l’extension complète.
- Au niveau de la cheville.
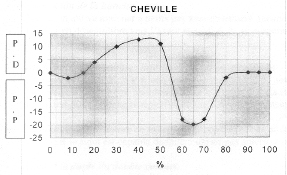

- Lors de l’attaque du talon, le pied est en position neutre (donc 90°) et en légère supination.
- Après ce contact, le pied se rabat sur le sol pour aboutir à un premier pic de flexion plantaire qui atteint environ 5 à 6°.
- Lors du passage à la verticale le pied reste à plat sur le sol en légère pronation. Comme le genou n’est pas en extension, on retrouve une flexion dorsale progressive d’environ 5 à 10°
durant cette phase d’appui monopodal. A ce moment là, le tibia effectue une rotation externe et déplace sa position grâce à l’articulation sous-astragalienne. La pronation redevient supination.
- Le talon se soulève ensuite progressivement et de manière synchrone avec la flexion de genou. On se retrouve à nouveau avec une flexion plantaire qui obtiendra son maximum (20°) après la poussée au niveau du gros orteil. Ici, le pied aura tendance à se trouver en éversion.
- Durant la phase oscillante la cheville revient en position neutre puis passe en flexion dorsale jusqu’au décollement de l’avant pied et retrouve une position neutre avant d’atteindre le contact talon. On est à 100% du cycle.
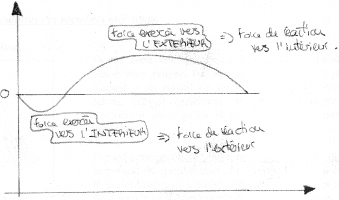
L’ETUDE DES DIFFERENTES FORCES.
- Les forces verticales.

- Le premier décrochage correspond à un amortissement au niveau des parties molles du talon.
- Le premier pic d’application des forces verticales représente 120 à 130% du poids corporel.
- Suit une phase de décrochage de ces forces, qui correspond au moment où le tronc passe à la verticale du pied porteur et juste avant que le talon commence à se décoller. A ce moment là le poids enregistré est inférieur au poids du sujet ne correspondant qu’à 70 voire 80% du poids corporel. Ceci est lié au soulagement engendré par l’énergie cinétique liée à l’oscillation du membre inférieur oscillant. Cette diminution transitoire du poids corporel est due à l’accélération du CG, alors que dans la phase de réception on est dans une phase de décélération.
- A la suite de cette phase de transition on retrouve de nouveau une phase de légère décélération associée à une augmentation de l’ordre de 120 à 130% du poids du sujet qui correspond à la phase de propulsion précédent le décollement du talon puis des orteils.
- Les forces latérales.

On parle aussi de forces de cisaillement.
- Lors de la prise de contact au niveau du talon on a une prise de position avec des forces en direction interne.
- Rapidement , on note un dérapage médian qui entraîne des contraintes latérales externes durant toute la durée de l’appui monopodal.
- A la fin de cet appui (60% du cycle de pas) ces forces latérales auront tendances à se neutraliser par une poussée dans l’axe au niveau du gros orteil.
- Les forces de cisaillement antéro-postérieures.
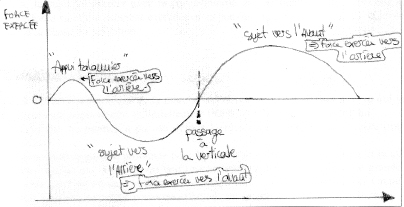

- Ces forces se décrivent par un premier pic de forces antérieures à la réception du talon.
- Rapidement les forces se dirigent en postérieur et correspondent à la phase de décélération du CG.
- Puis lors de la phase d’accélération du CG qui suit, ces forces vont s’inverser de postérieures à antérieures. Par la suite la propulsion antérieure va s’associer à la réception du talon controlatéral.
(attention il est question ici des forces de réactions du sol).
4ème PARTIE – LA BIOENERGETIQUE.
Il n’est pas spécialement intéressant d’analyser au niveau de la marche l’énergie mécanique mais préférable d’évaluer la consommation d’oxygène ou d’énergie correspondant à l’activité musculaire.
La marche est un système qui va privilégier le métabolisme aérobie, métabolisme étant le seul à permettre un approvisionnement énergétique efficace pour autoriser une durée suffisante de l’exercice.
Ce métabolisme est enregistré grâce à la différence artério-veineuse en oxygène. Le produit de cette différence par le débit cardiaque permet de calculer la consommation d’oxygène.
Ceci permet d’évaluer la fonction motrice dont le but est de développer deux types de forces :
- Celles qui vont contrôler le mouvement par la gestion du CG (accélération/décélération) en neutralisant aussi les phénomènes de frictions.
- Celles qui vont permettre de lutter contre les effets de la gravité.
On retrouve donc au niveau musculaire toutes les contractions possibles (isométriques, concentrique, excentrique). Lors de la marche c’est quand même les contractions excentriques qui dominent. Elles interviennent dans les mécanismes de correction des déséquilibres instantanés.
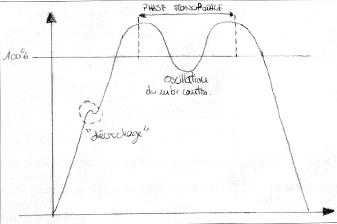
La marche à vitesse libre et spontanée chez l’adulte sein évolue sur le plan métabolique en trois phases :
- Phase liée à l’initiation de la marche : La filière anaérobie alactique
Cette filière fonctionne grâce à l’énergie des stock d’ATP et de phosphocréatine (PCr) dans le muscle.
Cette énergie est peu importante mais indispensable à l’initiation , c’est à dire au départ de l’actio.
Ce métabolisme est valable 8 à 12 secondes en fonction de la vitesse.
- Le système anaérobie lactique.
Sa mise en place est due à l’absence d’oxygène.
Cette filière correspond à la glycolyse anaérobie qui va produire en dégradant du glucose mais aussi va formant en même temps des lactates qui seront dégradés et seront ainsi utilisés également pour la formation d’ATP.
Le temps d’intervention de cette phase est de 30 à 120 secondes.
- La phase aérobie.
Elle correspond à un approvisionnement suffisant en O2 au niveau de la cellule musculaire, permettant la glycolyse aérobie.
Cette phase se trouve à son maximum entre la 1ère et 4ème minute, en atteignant un plateau vers la deuxième minute.
Cette phase va permettre de développer la marche de façon prolongée. Elle correspond à l’oxydation mitochondriale où une molécule de glucose permet la fabrication de 38 molécules d’ATP.
L’élément qui va organiser cela est la consommation d’oxygène. Donc la dépense énergétique dépendra à la fois des paramètres métaboliques du sujet mais aussi des paramètres spatio-temporels caractéristiques de la marche. Au de la de trois à six heures les paramètres limitant cette activité sont beaucoup plus l’insuffisance des stocks de glycogène musculaire ou bien l’abaissement de la glycémie agissant sur le système nerveux.
Pour aller plus loin :